
পার্কিং ম্যানেজমেন্ট সিস্টেম 3D এর দিকে অগ্রসর হতে পারে
বিশ্বব্যাপী শহরগুলি পার্কিং পরিচালনা করার জন্য আরও স্মার্ট উপায় নিয়ে পরীক্ষা করছে৷ কেউ কেউ গতিশীলভাবে মূল্য সমন্বয় করতে পার্কিং দখলের ডেটা ব্যবহার করে, যার ফলে পর্যাপ্ত জায়গার প্রাপ্যতা নিশ্চিত হয়; অন্যরা গ্রাউন্ড সেন্সর দিয়ে সজ্জিত রাস্তার ধারে পার্কিং সিস্টেম স্থাপন করে, তাদের বিস্তৃত স্মার্ট সিটি প্ল্যাটফর্মে একীভূত করে; এখনও অন্যরা হাজার হাজার পৃথক পার্কিং স্থান নিরীক্ষণের জন্য নেটওয়ার্কযুক্ত সেন্সর নিয়োগ করে। এই উদ্যোগগুলির একটি সুস্পষ্ট উদ্দেশ্য রয়েছে: যানবাহনের যানজট হ্রাস করা, রাস্তার পাশে পার্কিংয়ের দক্ষতা বৃদ্ধি করা এবং সীমিত শহুরে স্থানের আরও কার্যকর ব্যবহার করা।
যদিও এগুলোপার্কিং ম্যানেজমেন্ট সিস্টেমবিশ্বব্যাপী অনেক দেশে বাস্তবায়িত হয়েছে, অনেকগুলি এখনও খণ্ডিত বা অসম্পূর্ণ ডেটার উপর নির্ভর করে। গ্রাউন্ড সেন্সর/লুপ ডিটেক্টরের ইনস্টলেশন এবং বড় আকারের রক্ষণাবেক্ষণ ব্যয়বহুল, যখন ক্যামেরা-ভিত্তিক নজরদারি সিস্টেমগুলি আলোর অবস্থার জন্য সংবেদনশীল হতে পারে বা গোপনীয়তার উদ্বেগ বাড়াতে পারে। যেহেতু শহরগুলি তাদের স্মার্ট পার্কিং উদ্যোগগুলিকে স্কেল করতে চায়, চ্যালেঞ্জটি নিছক ডেটা সংগ্রহ করা নয়, বরং এটি নির্ভরযোগ্যভাবে, দক্ষতার সাথে এবং মাত্রায় করা।
LiDAR প্রযুক্তি পার্কিং ম্যানেজমেন্ট সিস্টেম সেক্টরের মধ্যে উল্লেখযোগ্য আকর্ষণ অর্জন করতে শুরু করেছে। LiDAR—হালকা সনাক্তকরণ এবং রেঞ্জিং-এর সংক্ষিপ্ত রূপ—ভৌত পরিবেশ সম্পর্কে সুনির্দিষ্টভাবে ত্রিমাত্রিক তথ্য ক্যাপচার করতে লেজার পালস নিয়োগ করে, যার ফলে আধুনিক পার্কিং ব্যবস্থাপনার জন্য একটি শক্তিশালী ডেটা ভিত্তি প্রদান করে। পার্কিং স্পেস দখল নিরীক্ষণ থেকে গাড়ির ধরন শ্রেণীবদ্ধ করা পর্যন্ত, LiDAR-ভিত্তিক সিস্টেমগুলি অপারেটরদের পার্কিং গতিবিদ্যার মধ্যে অন্তর্দৃষ্টি অর্জনের জন্য একটি স্তরের গ্র্যানুলারিটি সহ অন্তর্দৃষ্টি লাভ করে যা ঐতিহ্যগত সমাধানগুলি মেলে ধরার জন্য সংগ্রাম করে।

কেন LiDAR স্মার্ট পার্কিং ম্যানেজমেন্ট সিস্টেমের জন্য উপযুক্ত?
এর মূল অংশে, LiDAR দূরত্ব পরিমাপ করতে লেজার ডাল ব্যবহার করে কাজ করে। এই পরিমাপগুলি পরিবেশের একটি ঘন, ত্রিমাত্রিক উপস্থাপনা তৈরি করে - যা "বিন্দু মেঘ" নামে পরিচিত। ক্যামেরা চিত্রের বিপরীতে, এই ডেটা পরিবেষ্টিত আলোর অবস্থার দ্বারা প্রভাবিত হয় না; পরিবর্তে, এটি উচ্চ নির্ভুলতার সাথে পার্শ্ববর্তী পরিবেশের জ্যামিতি বর্ণনা করে।
এই 3D ডেটা পার্কিং অ্যাপ্লিকেশনের জন্য অনেক সুবিধা প্রদান করে।
প্রথমত, LiDAR ক্রমাগত পরিবর্তিত পরিবেশগত অবস্থার মধ্যে সামঞ্জস্যপূর্ণ কর্মক্ষমতা বজায় রাখে। যে ফ্যাক্টরগুলি সাধারণত ক্যামেরা সিস্টেমকে আপস করে — যেমন অন্ধকার, একদৃষ্টি বা ছায়া — লেজার-ভিত্তিক পরিমাপের উপর ন্যূনতম প্রভাব ফেলে। এটি LiDAR কে বহিরঙ্গন পার্কিং লট, গ্যারেজ এবং রাস্তার পাশের পরিবেশের জন্য বিশেষভাবে উপযোগী করে তোলে যেখানে সারাদিন আলোর অবস্থা ওঠানামা করে।
দ্বিতীয়ত, LiDAR চাক্ষুষ চেহারার পরিবর্তে শারীরিক কাঠামো ক্যাপচার করে। যানবাহন, বাধা, বাধা এবং পথচারী সবই ত্রিমাত্রিক বস্তু হিসাবে সনাক্ত করা হয়। এটি অ্যালগরিদমগুলিকে প্রথমে ভুল ব্যাখ্যার প্রবণ দ্বি-মাত্রিক চিত্রগুলি বিশ্লেষণ না করে বস্তুগুলিকে নির্ভরযোগ্যভাবে সনাক্ত করতে এবং ট্র্যাক করতে সক্ষম করে৷
অবশেষে, LiDAR ডেটা গোপনীয়তা-সচেতন নজরদারি সমর্থন করে। যেহেতু এই প্রযুক্তিটি চাক্ষুষ বিবরণের পরিবর্তে দূরত্ব পরিমাপ করে, তাই অতিরিক্ত সেন্সর দ্বারা পরিপূরক না হলে এটি শনাক্তযোগ্য বৈশিষ্ট্যগুলি-যেমন মানুষের মুখ বা লাইসেন্স প্লেটগুলি ক্যাপচার করে না৷ পৌরসভা এবং অপারেটরদের জন্য কঠোর ডেটা সুরক্ষা প্রয়োজনীয়তার সম্মুখীন, এটি একটি উল্লেখযোগ্য সুবিধা হতে পারে। সম্মিলিতভাবে, এই বৈশিষ্ট্যগুলি LiDAR কে ডেটা-চালিত পার্কিং সিস্টেমের জন্য একটি শক্তিশালী ভিত্তি করে তোলে।

অকুপেন্সি মনিটরিং: ব্যবহারিক পার্কিং ম্যানেজমেন্ট সিস্টেম অ্যাপ্লিকেশনে LiDAR।
পার্কিং পরিবেশে LiDAR-এর সবচেয়ে সরাসরি প্রয়োগগুলির মধ্যে একটি হল গাড়ির দখলের নিরীক্ষণ।
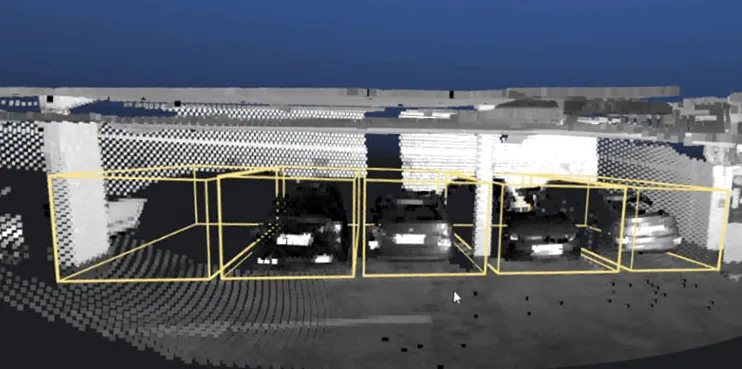
একটি সাধারণ ইনস্টলেশনের পরিস্থিতিতে, LiDAR সেন্সরগুলি বিদ্যমান অবকাঠামোতে মাউন্ট করা হয় - যেমন আলোর খুঁটি বা বিল্ডিংয়ের সম্মুখভাগ - একটি পার্কিং লট বা রাস্তার এলাকা উপেক্ষা করে। সেন্সরগুলি ক্রমাগত তাদের চারপাশ স্ক্যান করে, 3D ডেটা পয়েন্টের একটি স্ট্রিম তৈরি করে। সফ্টওয়্যার বস্তুগুলি সনাক্ত করতে, তাদের সুনির্দিষ্ট অবস্থানগুলি নির্ধারণ করতে এবং সেগুলিকে শ্রেণিবদ্ধ করতে রিয়েল টাইমে এই ডেটা প্রক্রিয়া করে।
পার্কিং স্পেস সিস্টেমের মধ্যে মনোনীত করা যেতে পারে. যখন একটি যানবাহন নিরীক্ষণ করা অঞ্চলে প্রবেশ করে, সেন্সরগুলি পূর্বে উপস্থিত ছিল না এমন একটি বস্তু সনাক্ত করে পয়েন্ট ক্লাউডের মধ্যে এটি সনাক্ত করে। সনাক্ত করা পয়েন্টগুলি পার্কিং স্থানের দখলের স্থিতিতে পরিবর্তন আনে। গাড়িটি চলে গেলে, স্থানটি পরবর্তীতে আবার উপলব্ধ হিসাবে চিহ্নিত করা হয়।
LiDAR ডেটার অত্যন্ত উচ্চ নির্ভুলতার কারণে, প্রতিটি মনিটরিং জোনের মধ্যে সনাক্ত করা বস্তুর জন্য আকার থ্রেশহোল্ড স্থাপন করা যেতে পারে। এটি নিশ্চিত করে যে ছোট বস্তু - যেমন শপিং কার্ট, ধ্বংসাবশেষ, বা পথচারীরা যাতায়াত করে - মিথ্যা দখলের ঘটনাগুলিকে ট্রিগার করে না। একটি পার্কিং স্পেস শুধুমাত্র তখনই ব্যাপৃত হিসাবে চিহ্নিত করা হয় যখন সনাক্ত করা বস্তুটি প্রিসেট প্যারামিটার (যেমন, একটি গাড়ির সাধারণ মাত্রা) অতিক্রম করে। এই কনফিগারযোগ্য ফিল্টারিং প্রক্রিয়াটি সনাক্তকরণের নির্ভুলতা বাড়ায়, এমনকি ঘন ঘন যানবাহনের চলাচলের দ্বারা চিহ্নিত জটিল পরিবেশেও নির্ভরযোগ্য দখলের ডেটা নিশ্চিত করে।
যেহেতু LiDAR ব্যাপক স্থানিক তথ্য ক্যাপচার করতে সক্ষম, একটি একক সেন্সর প্রায়ই একাধিক পার্কিং স্থান একযোগে নিরীক্ষণ করতে পারে। সুগঠিত পরিবেশে - যেমন পার্কিং লট বা সুস্পষ্টভাবে সংজ্ঞায়িত সীমানা সহ কার্বসাইড এলাকা - একটি একক ইনস্টলেশন কার্যকরভাবে একটি সম্পূর্ণ অঞ্চলকে কভার করতে পারে।
একটি পার্কিং স্থান দখল করা দরকারী কিনা তা জানার সময়, "কী" দখল করছে তা বোঝা আরও বেশি মূল্যবান হতে পারে।
LiDAR-ভিত্তিকপার্কিং ম্যানেজমেন্ট সিস্টেমযানবাহনকে তাদের আকার এবং আকৃতির উপর ভিত্তি করে শ্রেণিবদ্ধ করতে পারে। পয়েন্ট ক্লাউডের মধ্যে ক্যাপচার করা 3D জ্যামিতি বিশ্লেষণ করে, অ্যালগরিদমগুলি যাত্রীবাহী গাড়ি, ভ্যান, ট্রাক বা দুই চাকার যানবাহনের মতো বিভাগগুলির মধ্যে পার্থক্য করতে পারে৷
এই তথ্যটি ব্যবহারিক অ্যাপ্লিকেশনের বিস্তৃত পরিসরের দরজা খুলে দেয়। উদাহরণ স্বরূপ, অপারেটররা বিশ্লেষণ করতে পারে যে কার্বসাইড পার্কিং স্পেসগুলি - মূলত স্বল্পমেয়াদী যাত্রী ড্রপ-অফের জন্য মনোনীত - প্রায়শই ডেলিভারি ভ্যান দ্বারা দখল করা হয়। একইভাবে, বড় যানবাহন সম্পর্কিত ডেটা লোডিং জোন বা বাণিজ্যিক পার্কিং লটের মধ্যে পার্কিংয়ের চাহিদা মূল্যায়নে শহরগুলিকে সহায়তা করতে পারে।
যানবাহনের শ্রেণীবিভাগ আরও কার্যকর প্রয়োগের সুবিধা দেয়। যদি প্রবিধান নির্দিষ্ট স্থান ব্যবহার থেকে নির্দিষ্ট ধরণের যানবাহনকে সীমাবদ্ধ করে, স্বয়ংক্রিয় পর্যবেক্ষণ সিস্টেম পর্যালোচনার জন্য সম্ভাব্য লঙ্ঘনগুলিকে চিহ্নিত করতে পারে।
পার্কিং সুবিধার মধ্যে, গাড়ির শ্রেণিবিন্যাস ডেটা অপারেটরদের বুঝতে সাহায্য করে যে কীভাবে বিভিন্ন আকারের যানবাহন ক্ষমতা এবং ট্র্যাফিক প্রবাহের দক্ষতাকে প্রভাবিত করে। শহুরে যানবাহনের বহরগুলি ক্রমবর্ধমান বৈচিত্র্যময় হয়ে উঠছে - কমপ্যাক্ট ইলেকট্রিক যান থেকে বড় ডেলিভারি ট্রাক পর্যন্ত - এই তথ্য সুবিধা পরিকল্পনার জন্য আরও গুরুত্বপূর্ণ হয়ে উঠছে।
গুরুত্বপূর্ণভাবে, এই বিশ্লেষণগুলি চাক্ষুষ স্বীকৃতির পরিবর্তে ত্রিমাত্রিক বৈশিষ্ট্যের উপর নির্ভর করে। লাইসেন্স প্লেট পড়ার বা ভিজ্যুয়াল বিশদ ক্যাপচার করার প্রয়োজন ছাড়াই সিস্টেমটি ভ্যান বা ট্রাকের আকার এবং আকার ধারণ করে একটি বস্তুকে সনাক্ত করতে পারে।
পার্কিং শিল্প ধীরে ধীরে স্ট্যাটিক অবকাঠামো থেকে গতিশীল, ডেটা-চালিত ব্যবস্থাপনায় রূপান্তরিত হচ্ছে। এই রূপান্তরের জন্য বিভিন্ন প্রতিযোগী চাহিদার ভারসাম্যের প্রয়োজন হয়—যার মধ্যে ব্যক্তিগত যানবাহন, মালবাহী পরিবহন, শেয়ার্ড মোবিলিটি সার্ভিস, এবং পাবলিক স্পেস ইউটিলাইজেশন—কার্বসাইড এবং পার্কিং লটের সীমিত ক্ষমতার মধ্যে।
যেহেতু শহরগুলি বৃহত্তর পরিবহন বাস্তুতন্ত্রের মধ্যে পার্কিংয়ের ভূমিকা নিয়ে পুনর্বিবেচনা করে চলেছে, সুনির্দিষ্ট, গোপনীয়তা-সচেতন ডেটা সরবরাহ করতে সক্ষম প্রযুক্তিগুলি ক্রমবর্ধমান গুরুত্বপূর্ণ ভূমিকা পালন করবে। অপারেটরদের তাদের পার্কিং ম্যানেজমেন্ট সিস্টেমের মধ্যে একটি নতুন লেন্সের মাধ্যমে পার্কিং অবকাঠামো দেখতে সক্ষম করে LiDAR দ্রুত একটি মূল হাতিয়ার হিসেবে আবির্ভূত হচ্ছে।
অনুসন্ধান পাঠান



X
আমরা আপনাকে একটি ভাল ব্রাউজিং অভিজ্ঞতা দিতে, সাইটের ট্র্যাফিক বিশ্লেষণ করতে এবং সামগ্রী ব্যক্তিগতকৃত করতে কুকিজ ব্যবহার করি। এই সাইটটি ব্যবহার করে, আপনি আমাদের কুকিজ ব্যবহারে সম্মত হন।
গোপনীয়তা নীতি